Einfahrt/Ausfahrt: Geplant wurde der Lift in die
bestehende eingleisige Strecke einzufügen und ge Fach werden 4
Gleise mal ca. 2m Länge und davon 6 Fächer bereit gestellt.Die
Zufahrt und Abfahrten werden über Weichen gesteuert.
Funktionsweise der Mechanik
Die Mechanik wandelt die rotatorische Bewegung des
Schrittmotors in eine translatorische (lineare) Bewegung
um:
Schrittmotor (Stepper-Motor): Liefert hochpräzise
Drehbewegungen. Er dreht sich in fest definierten
Winkelschritten (z. B. 1,8° pro Schritt).
Die Ansteuerung über einen Mikrocontroller (Arduino)
und einen Motortreiber (z. B. DRV8825) ermöglicht eine
exakte Kontrolle der Position. Man kann die Anzahl der Schritte
programmieren, die notwendig sind, um den Lift von einer Ebene
zur nächsten zu bewegen.
Gewindespindel (Trapezgewindespindel): Sie ist direkt
mit der Motorwelle verbunden oder wird über eine Kupplung
angetrieben.
Gewindemutter: Die Liftplattform ist fest mit einer
Gewindemutter verbunden, die auf der Spindel läuft.
Wenn sich die Spindel dreht, bewegt die Mutter die
Liftplattform entsprechend der Steigung der Spindel
linear nach oben oder unten.
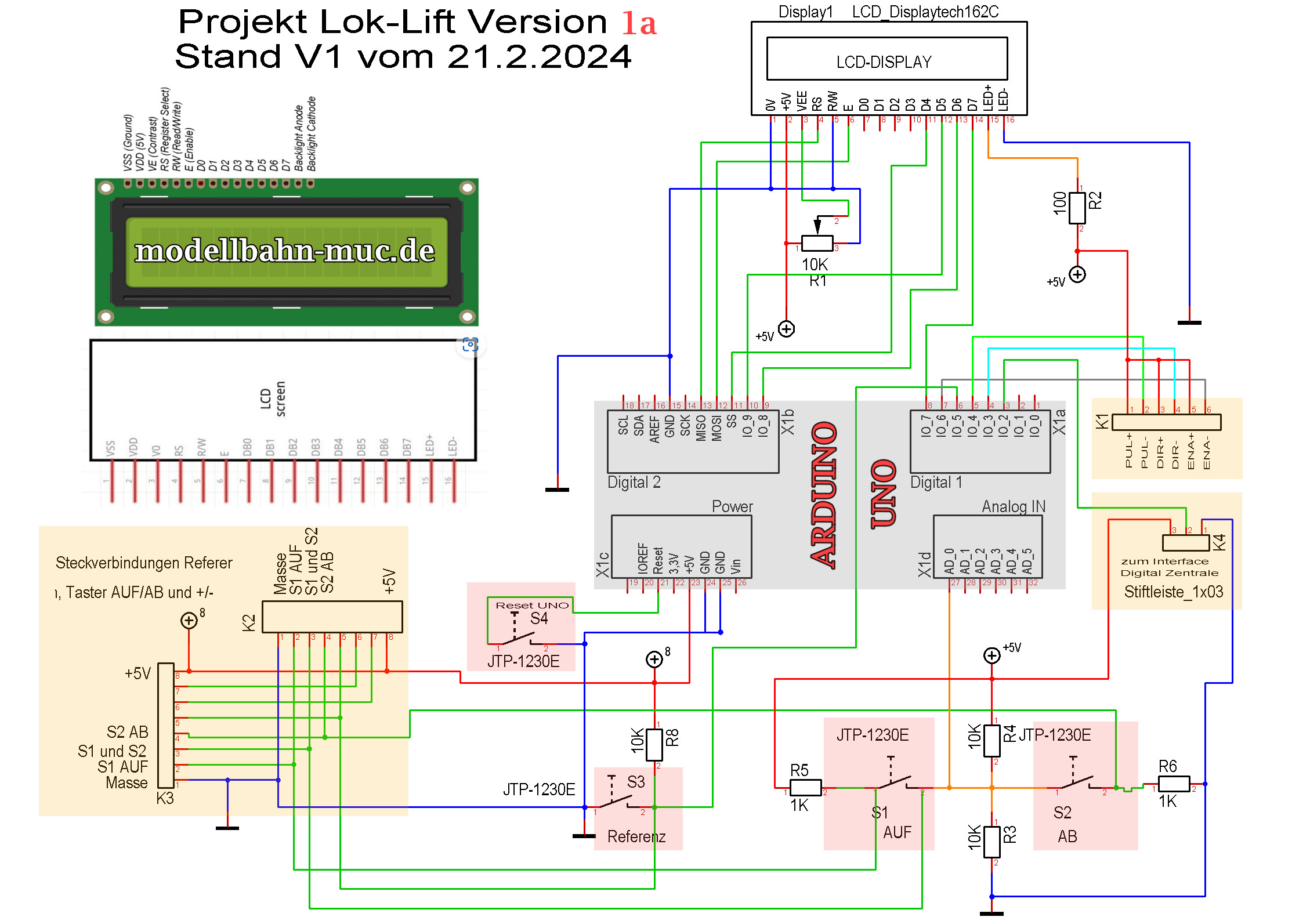
Grobe Übersicht vom der Schaltung:
Hier ein kleines Testvideo vom
Liftaufbau Prototyp

Leiterplatte noch ohne Prozessor Arduino
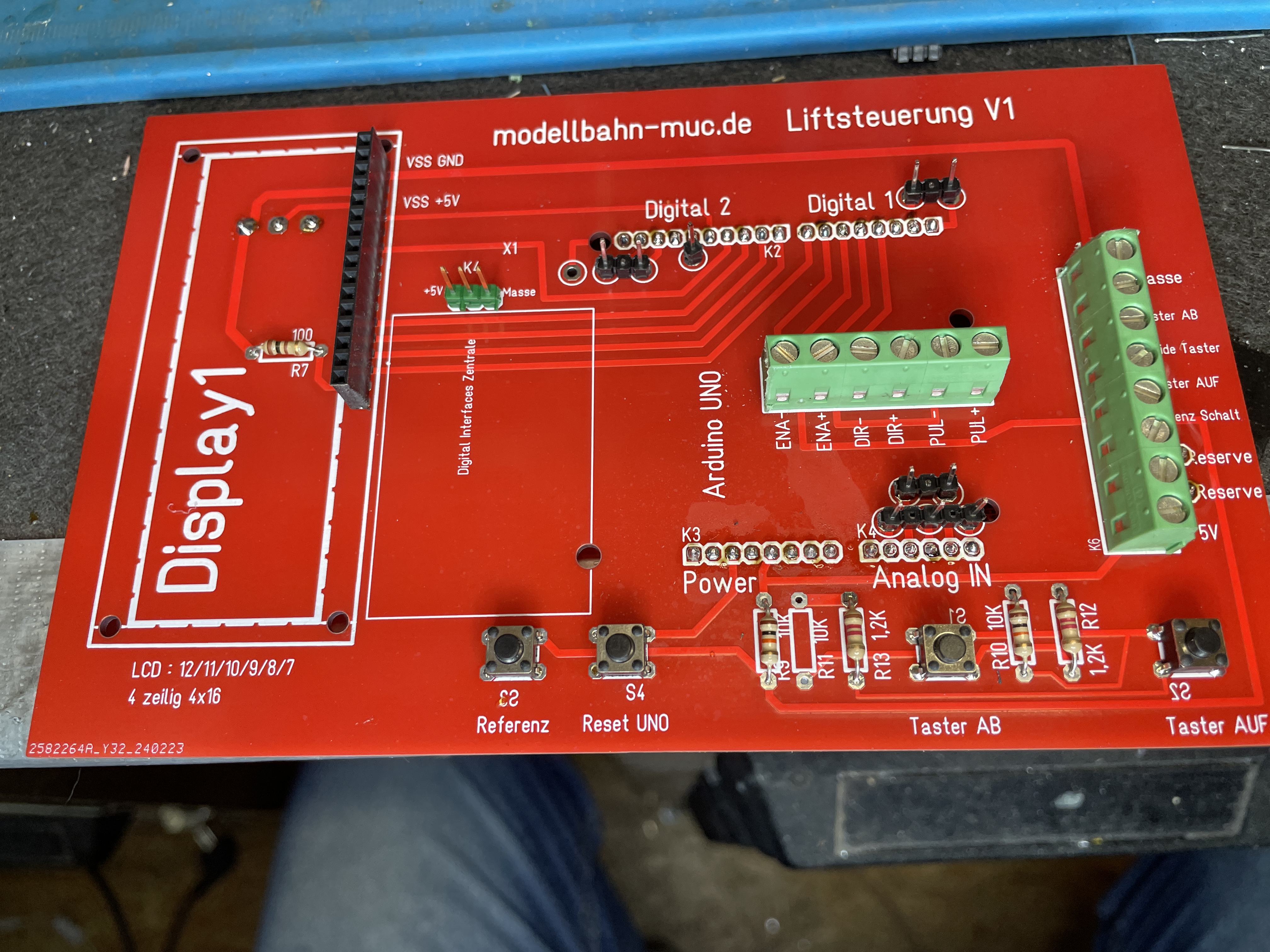
Hier die Leiterplatte mit dem Arduino auf der Rückseite und dem
kleinen DCC Interface (grün)

 Diese Seite
noch in Bearbeitung
Diese Seite
noch in Bearbeitung
